Transitions
Overview
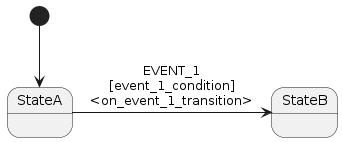
Transition is an entity that allows changing current HSM state to a different one. Its definition includes:
starting state: state from which transition is possible
target state: new state which HSM which have if transition is successful
triggering event: even which triggers transition
condition (optional): additional logic to restrict transition
callback (optional): will be called during transition
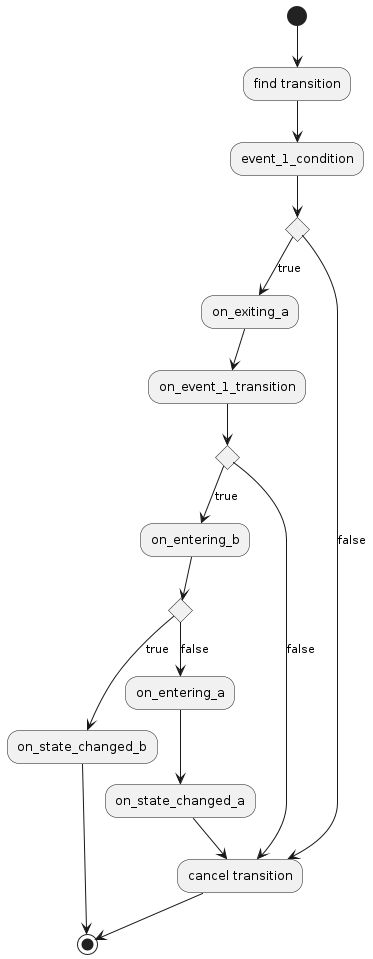
HSM applies following logic when trying to execute a transition:
It is possible to define multiple transitions between two states. As a general rule, these transitions should be exclusive, but HSM doesn’t enforce this. If multiple valid transitions are found for the same event then the first applicable one will be used (based on registration order). But this situation should be treated by developers as a bug in their code since it most probably will result in unpredictable behavior.
Usage
To register transition use HierarchicalStateMachine::registerTransition() API:
hsm.registerTransition(MyStates::StateA,
MyStates::StateB,
MyEvents::EVENT_1,
&hsmHandler,
&HandlerClass::on_event_1_transition,
&HandlerClass::event_1_condition,
true);
hsm.registerTransition(MyStates::StateA,
MyStates::StateB,
MyEvents::EVENT_1,
[](const hsmcpp::VariantVector_t& args){ ... },
[](const hsmcpp::VariantVector_t& args){ ... return true; },
true);
Call HierarchicalStateMachine::transition() API to trigger a transition.
hsm.transition(MyEvents::EVENT_1);
Normally if you try to send event which is not handled in current state it will be just ignored by HSM without any notification. But sometimes you might want to know in advance if transition would be possible or not. You can use HierarchicalStateMachine::isTransitionPossible() API for that. It will check if provided event will be accepted by HSM taking in consideration:
current state
pending events
conditions assigned to transitions
Note
It is still possible for HSM to reject your event if after HierarchicalStateMachine::isTransitionPossible() some other thread will manage to trigger another transition be careful when using it in multi-threaded environment.
Cancelling pending transitions
By default, transitions are executed asynchronously and it’s a recommended way to use them. When multiple events are sent at the same time they will be internally queued and executed sequentially. Potentially it’s possible to have multiple events queued when you need to send a new event which will make previous events obsolete (for example user want to cancel operation). In this case you can use HierarchicalStateMachine::transitionWithQueueClear() or HierarchicalStateMachine::transitionEx() to clear pending events:
hsm.transitionWithQueueClear(MyEvents::EVENT_1);
hsm.transitionEx(MyEvents::EVENT_1, true, false);
Note
Current ongoing transition can’t be canceled.
Self transitions
Self-transitions are transitions for which starting and target states are the same.
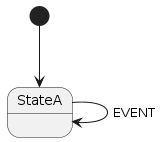
To register a self-transition use HierarchicalStateMachine::registerSelfTransition() API:
hsm.registerSelfTransition(MyStates::StateA,
MyEvents::EVENT_1,
TransitionType::INTERNAL_TRANSITION,
&hsmHandler,
&HandlerClass::on_event_1_transition,
&HandlerClass::event_1_condition,
true);
hsm.registerSelfTransition(MyStates::StateA,
MyEvents::EVENT_1,
TransitionType::INTERNAL_TRANSITION,
[](const hsmcpp::VariantVector_t& args){ ... },
[](const hsmcpp::VariantVector_t& args){ ... return true; },
true);
Note
Though using HierarchicalStateMachine::registerSelfTransition() is a recommended way for defining self-transitions, you can also use HierarchicalStateMachine::registerTransition() API. Keep in mind that in this case transition type will be automatically set to “external”.
There are 2 types of self-transitions (see TransitionType enum):
Transition Type |
Description |
|---|---|
external |
During external transition, state machine exits current active state and returns back to it right away. This results in all entry, exit and state actions being invoked. This also affects substates if current state contains any. |
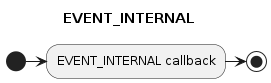
internal |
An internal transition does not allow the exit and entry actions to be executed. So only transition callback will be executed without any impact on active states. |
Difference between these two types can be demonstrated with this example:
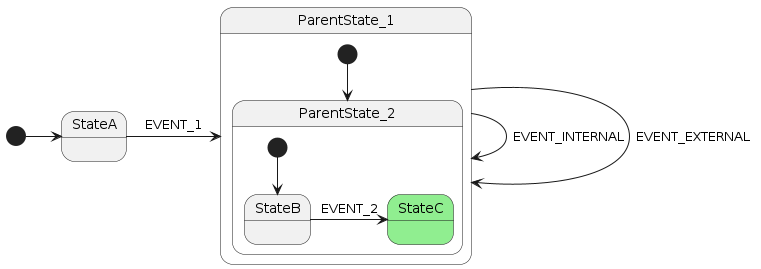
Let’s assume StateC is currently active. If EVENT_INTERNAL is triggered then only following callbacks will be executed:
If EVENT_EXTERNAL is triggered then all corresponding exit/enter callbacks will be processed:
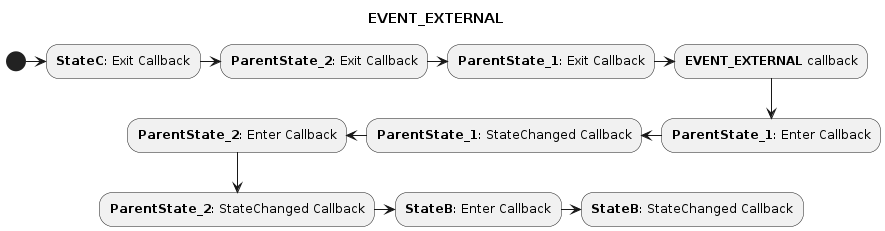
Note
Notice how after external self-transition StateB became active. This happened due to state machine exiting from ParentState_1 and, consequentially, exiting from it’s substates too.
Conditional transitions
Sometimes transition should be executed only when a specific condition is met. This could be achieved by setting condition callback and expected value. Transition will be ignored if value returned by callback doesnt match expected one.
Priority of transitions
Ideally, when designing state machine, you should avoid having multiple transitions which could be valid at the same time. This will make understanding the logic and debugging easier. But if for some reason your state machine will contain such transition, hsmcpp library will still handle them in a deterministic and predictable manner:
all valid transitions will be executed if they are defined on the same level;
self transitions are always executed before any outgoing transitions;
if transitions are defined on multiple levels (for example between substates and on the same level as a parent):
internal transitions between substates always have the highest priority. Outer transitions will be ignored;
Let’s look at the following example:
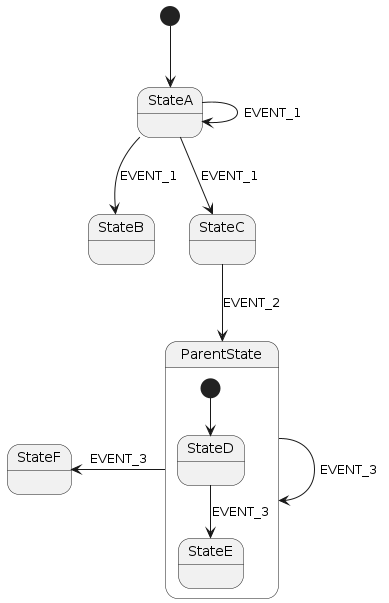
If StateA is active and EVENT_1 is triggered:
first self transition for StateA will be executed;
then both states B and C will be activated (see Parallel States section for details).
If StateD is active and EVENT_3 is triggered:
only StateD->StateE transition will be executed since internal transitions have higher priority.
If StateE is active and EVENT_3 is triggered:
first self transition for ParentState will be executed;
then ParentState->StateF transition will be executed.
Synchronous transitions
Warning
It’s strongly discouraged to usage synchronous transitions in production code. They were added mostly for testing purposes, since async unit tests are a headache to deal with.
Transitions can be executed synchronously using HierarchicalStateMachine::transitionEx() API. Please keep these things in mind when using synchronous transitions:
Don’t execute synchronous transitions from HSM callbacks:
all callbacks will still be executed on dispatcher’s thread. So triggering a synchronous transition from HSM callback will result in a deadlock.
When using Glib-based dispatcher, don’t execute synchronous transitions from GLib thread that was assigned to dispatcher:
unless you specifically created a custom glib context, dispatcher will be running on a main thread of your application. Calling synchronous transition anywhere on this thread will result in a deadlock.